在線
客服
在線客服服務(wù)時間:9:00-19:00
QQ客服:
旺旺客服:
客服
熱線
18623896844
13264445812
18612707474
7*14小時客服服務(wù)熱線
添加
微信
 風(fēng)清揚(yáng)官方微信
風(fēng)清揚(yáng)官方微信
打賞
站長
 感恩支持
感恩支持
索尼首創(chuàng)堆疊式直接飛行時間測距傳感器,可用于SPAD像素車載激光雷達(dá)
日本,東京-索尼公司(下稱:索尼)宣布開發(fā)出了一個全新的交替式直接飛行時間(dToF)測距傳感器,可用于采用單光子雪崩二極管(SPAD)的車載激光雷達(dá),這在某些尚屬首次*。該成果于2021年2月13日開幕的國際固態(tài)電路大會(ISSCC)上進(jìn)行了發(fā)布。
* 1個車載激光雷達(dá)的堆疊式測距傳感器領(lǐng)域,終止2021年2月18日。
除了攝像頭和毫米波雷達(dá)等傳感設(shè)備外,激光雷達(dá)作為一種高精度檢測和識別道路狀況以及車輛和行人等物體的位置和形狀的方法,正變得越來越重要。高級駕駛輔助系統(tǒng)( ADAS)的普及和自動駕駛(AD)對這一技術(shù)的需求推動了這一趨勢。
SPAD是利用雪崩倍增技術(shù)將分段入射光子的電子放大,從而形成雪崩式疊加的相對結(jié)構(gòu),即使是微弱的光線也能檢測到。通過采用SPAD作為dToF傳感器中的探測器,可以實現(xiàn)遠(yuǎn)距離,精密的距離測量,該傳感器根據(jù)來自光源發(fā)出的光被物體反射后返回到傳感器的飛行時間(時間差)來測量與物體的距離。現(xiàn)在,索尼利用CMOS圖像傳感器開發(fā)過程中積累的背照式誤差結(jié)構(gòu),,堆疊結(jié)構(gòu),銅-銅連接* 2等技術(shù),在拆分芯片上實現(xiàn)了SPAD時序和測距處理電路,成功開發(fā)出了分離但精度的傳感器。如此就可以以15厘米為單位間隔實現(xiàn)先進(jìn),高速度的測量,測距可達(dá)300米* 3。新型傳感器還可以實現(xiàn)各種溫度和天氣等惡劣條件下的檢測和識別,提高激光雷達(dá)的可靠性,這對于汽車設(shè)備而言至關(guān)重要。單芯片的實現(xiàn)還有助于降低激光雷達(dá)的成本。
索尼還開發(fā)了配備了這種新技術(shù)的MEMS(微機(jī)電系統(tǒng)*)。4激光雷達(dá)系統(tǒng),剎車進(jìn)行評估,目前已向客戶及合作伙伴提供。
*2在像素部分(上層芯片)和邏輯電路(下層芯片)堆疊時,通過連接的Cu(銅)焊盤提供電氣連續(xù)性的技術(shù)。與通過在像素區(qū)域周圍嵌入電極實現(xiàn)連接的TSV(硅穿孔)布線相比,這種方法可以提高設(shè)計的自由度,提高生產(chǎn)效率,實現(xiàn)更緊湊的尺寸,同時提高性能。
*3在陰天環(huán)境下,使用6×6像素(水平×垂直)的加法模式測量高度為1米、反射率為10%的物體時。
*4 "MEMS "是指利用微細(xì)加工技術(shù)將各種元件集成在一塊基板上的設(shè)備。這種激光雷達(dá)采用的是依靠MEMS鏡掃描光源發(fā)出的光的方法
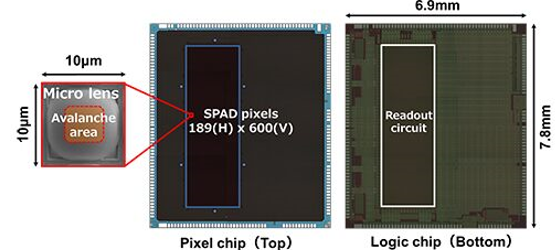

新開發(fā)產(chǎn)品結(jié)構(gòu)圖
SPAD像素原理
在dToF深度/距離傳感器上,SPAD能夠檢測單個光子。在SPAD像素的電極上施加擊穿電壓(VBD)*5,并令大于擊穿電壓的超額偏壓 (VEX)*6中的光子進(jìn)入,雪崩倍增效應(yīng)會增加光電轉(zhuǎn)換中產(chǎn)生的電子。當(dāng)電極間的電壓降到擊穿電壓值時,雪崩倍增會停止。當(dāng)雪崩倍增產(chǎn)生的電子被放電并回到擊穿電壓后(淬滅作用),電極間的電壓再次被設(shè)定為超額偏壓(VEX),以便能夠檢測到下一個光子(再充電作用)。這種由光子的到達(dá)而觸發(fā)的電子倍增作用被稱為蓋革模式。
*5 雪崩倍增開始時的電壓。
*6超過擊穿電壓(VBD)的電壓。
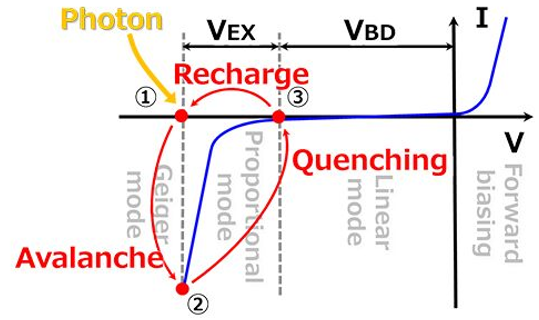
SPAD像素原理(電流/電壓)
雪崩乘法圖示
主要優(yōu)勢
1) 以15厘米為單位間隔進(jìn)行高精度測量,測距可達(dá)300米。
新技術(shù)采用了背照式SPAD像素結(jié)構(gòu),利用銅-銅連接方式,在像素芯片(頂部)和配備測距處理器電路的邏輯芯片(底部)之間實現(xiàn)各像素的導(dǎo)通。這樣一來,可以將除光合像素以外的所有電路都放在底部,從而實現(xiàn)高開口率*7和22%*8的高光子檢測效率。即使是小型的芯片,也能在10μm的像素尺寸下實現(xiàn)約11萬有效像素(189×600像素)的高分辨率。這就可以實現(xiàn)以15厘米為單位間隔進(jìn)行高精度測量,測距較遠(yuǎn)可達(dá)300米,從而有助于提高激光雷達(dá)的檢測和識別性能。
*7從每個像素的入射面看,光圈部分(除遮光部分外的部分)的比率。
*8當(dāng)普通車載激光雷達(dá)中使用的905nm波長的激光投射到物體上時。
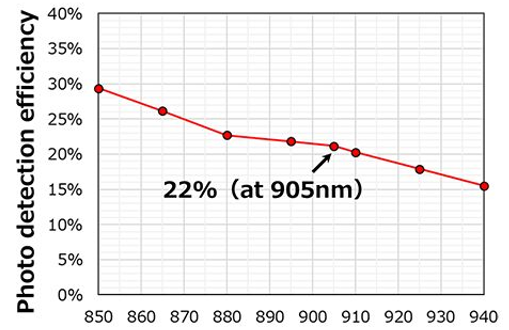
光子檢測效率和波長
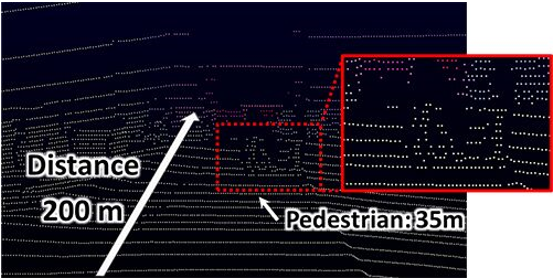
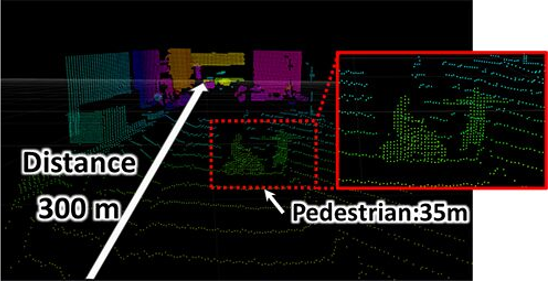
點(diǎn)云(左:傳統(tǒng)激光雷達(dá),右:新開發(fā)的激光雷達(dá))
2) 使用索尼獨(dú)創(chuàng)的時間數(shù)字轉(zhuǎn)換器(TDC)和無源淬滅/充電電路,實現(xiàn)高速響應(yīng)
索尼獨(dú)創(chuàng)性地開發(fā)了將檢測到的光子飛行時間轉(zhuǎn)換為數(shù)字值的時間數(shù)字轉(zhuǎn)換器(TDC)和無源淬滅/充電電路,并將其與每個像素的銅-銅連接在一起,使每個光子在正常情況下的響應(yīng)速度提高到6納秒*9。高速測距處理通過實時檢測和識別周圍的情況,為安全駕駛做出貢獻(xiàn)。
*9在60℃的溫度環(huán)境下。
3) 惡劣條件下穩(wěn)定的光子檢測效率和響應(yīng)速度
索尼獨(dú)創(chuàng)的SPAD像素結(jié)構(gòu),即使在-40℃至125℃的惡劣條件下,也能實現(xiàn)穩(wěn)定的光子探測效率和響應(yīng)速度,有助于提高激光雷達(dá)的可靠性。
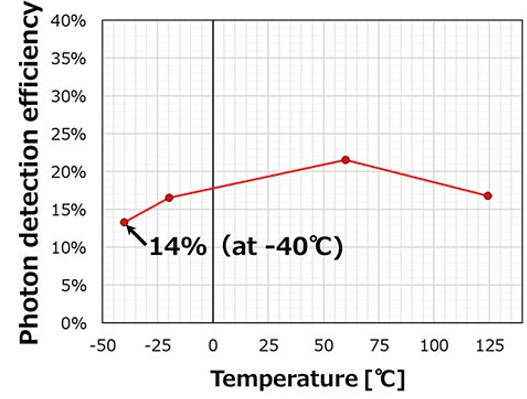
光子檢測效率和運(yùn)行溫度
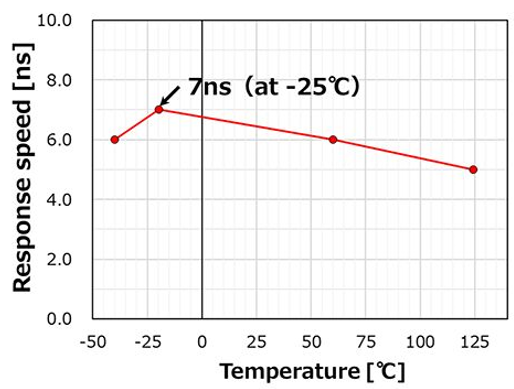
響應(yīng)速度和運(yùn)行溫度
關(guān)鍵參數(shù)
| SPAD像素總數(shù) | 189 x 600像素(H x V) 約110,000像素 |
| 圖像尺寸 | 對角長度6.25 mm(1/2.9型) |
| 建議光源波長 | 905 nm |
| SPAD單元尺寸 | 10 μm x 10 μm |
| 單元尺寸(ToF像素單位) | 3 x 3像素(H x V) |
| 消耗功率 | 1,192 mW |
| 光子檢測效率 | 22% |
| 響應(yīng)速度 | 6 ns |
| 飽和信號量(較大計數(shù)率) | 60,000,000 cps |
| 較大檢測距離 | 300 m |
| 300米測距時的距離精度 | 3 x 3像素(H x V)加法模式:30cm 6 x 6像素(H x V)加法模式:15cm |
(本文譯自英文原文,供參考)
********************************************************************************************